
TechnoPat #10 - Bagaimana Drone Bekerja?
Saturday, 20 November 2021
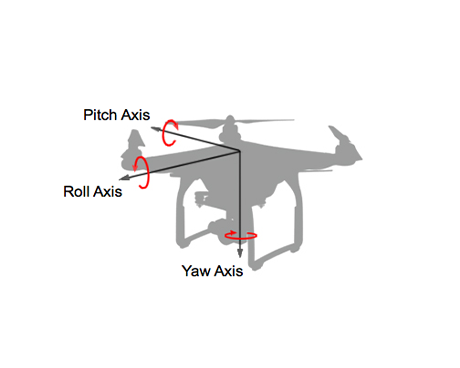
3 Sumbu rotasi :
Vertical axis (yaw)
Sumbu ini berasal dari center of gravity dan tegak lurus dengan sayap dan garis refrensi fuselage. Pergerakan pada sumbu ini disebut dengan yaw. Nilai positif dari sumbu ini akan membuat pesawat berbelok ke kanan. Yaw dikendalikan oleh rudder.
Longitudinal axis (roll)
Nilai positif dari sumbu ini akan membuat sayap kiri pesawat terangkat dan sayap kanan pesawat turun. Rolling dikendalikan oleh aileron. Pilot melakukan rolling dengan meningkatkan lift pada wing satu dan menguranginya pada wing lainnya. Hal ini akan mempengaruhi bank angle.
Lateral axis (pitch)
Bisa juga disebut dengan sumbu melintang, berasal dari center of gravity dan sejajar dengan garis dari wing tip satu ke wing tip yang lain. Pergerakan pada sumbu ini disebut dengan pitching. Nilai positif dari sumbu ini akan mengangkat hidung pesawat ke atas dan menurunkan ekor pesawat ke bawah. Pitching dikendalikan oleh elevator.
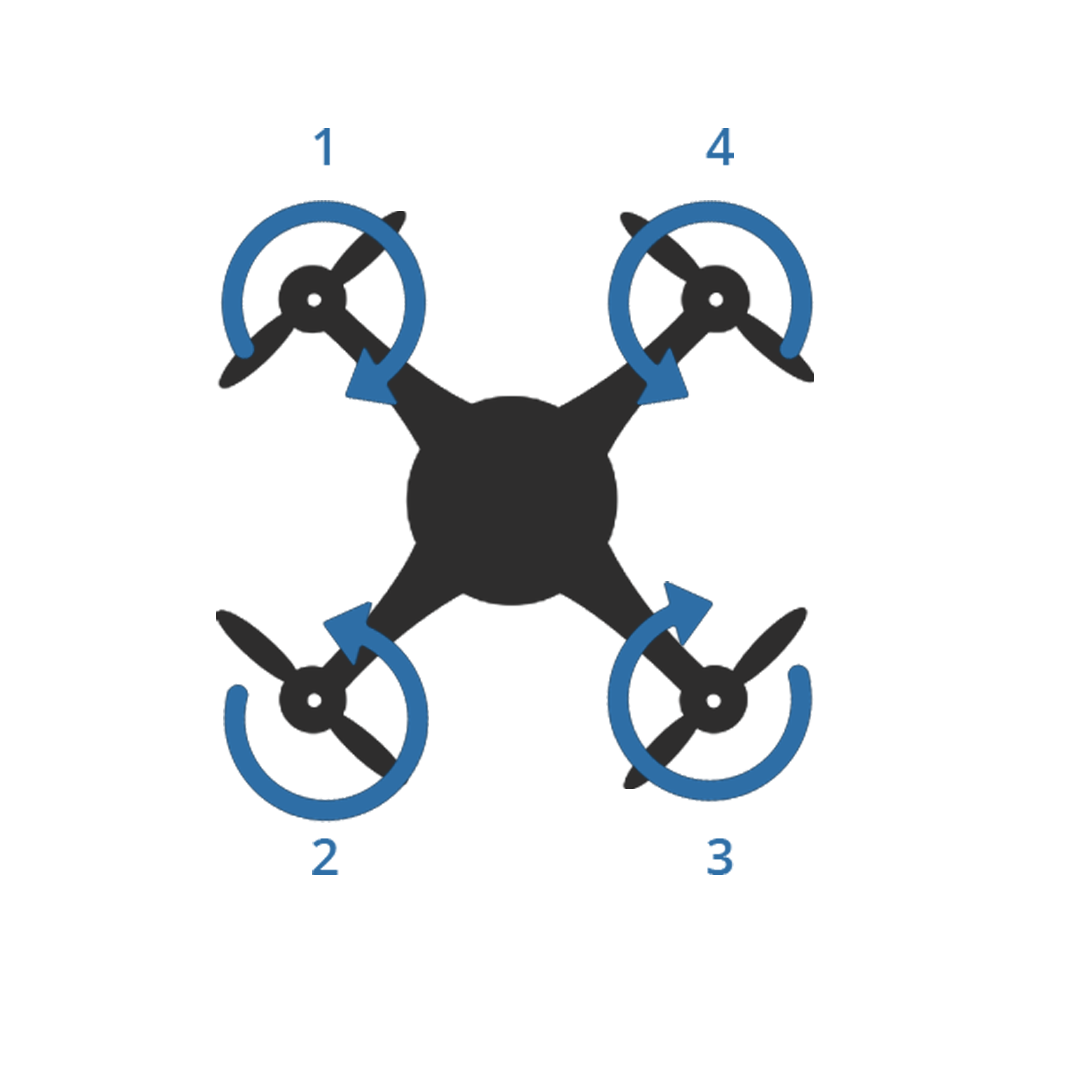
HOVER
HOVERING adalah kondisi dimana drone dalam keadaan stay atau diam. Kondisi ini memerlukan beberapa persyaratan. Pertama, kecepatan semua rotor atau baling baling itu harus sama.kedua, arah baling baling 1 dan 3 harus sama dengan jarum jam (clockwise) dan baling baling 2 dan 4 berlawanan dengan arah jarum jam.
FORWARD
FORWARD adalah kondisi dimana drone maju kedepan. agar drone bisa maju kedepan, kecepatan baling - baling 2 dan 3 harus lebih besar dibanding kecepatan baling - baling 1 dan 4. Dalam kondisi ini maka keadaan drone cenderung menurun kedepan. Ini akan menciptakan drag force. Karena adanya drag force ini drone bisa maju kedepan.
SIDEWARD
SIDEWARD adalah kondisi dimana drone bergerak kesamping. agar drone bisa bergerak kesamping, kecepatan baling - baling 1 dan 2 harus lebih besar dibanding kecepatan baling - baling 3 dan 4 atau sebaliknya. sama seperti gerakan forward, kondisi ini akan menciptakan drag force namun kali ini secara vertikal/kesamping.
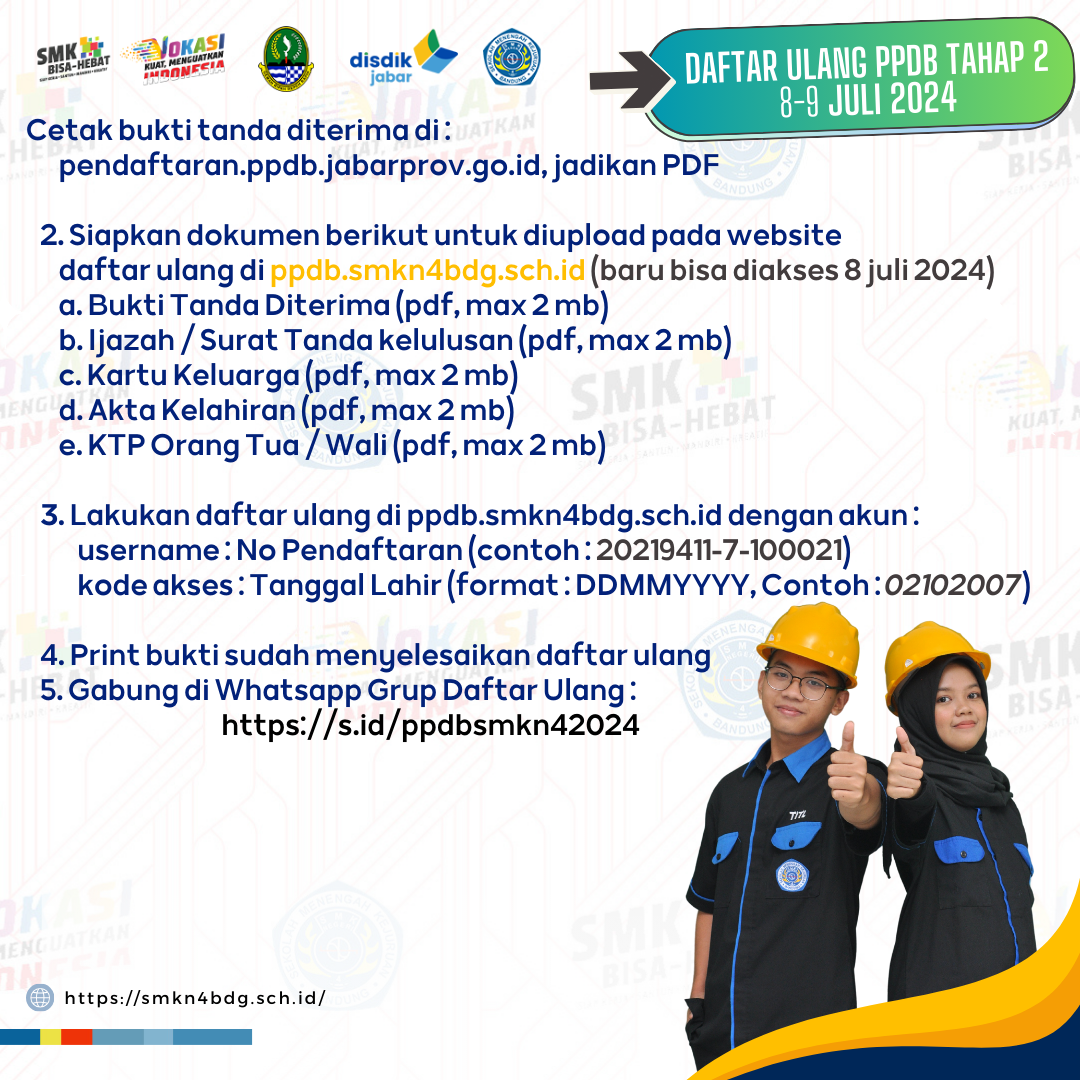
Mekanisme daftar ulang PPDB tahap 2
05 July 2024
Selamat ! Kepada Calon Peserta Didik yang ...
Baca Selengkapnya
PPDB SMKN 4 Bandung Tahap 2 !
24 June 2024
Wargi, jangan lewatkan momen PPDB Tahap 2 ...
Baca Selengkapnya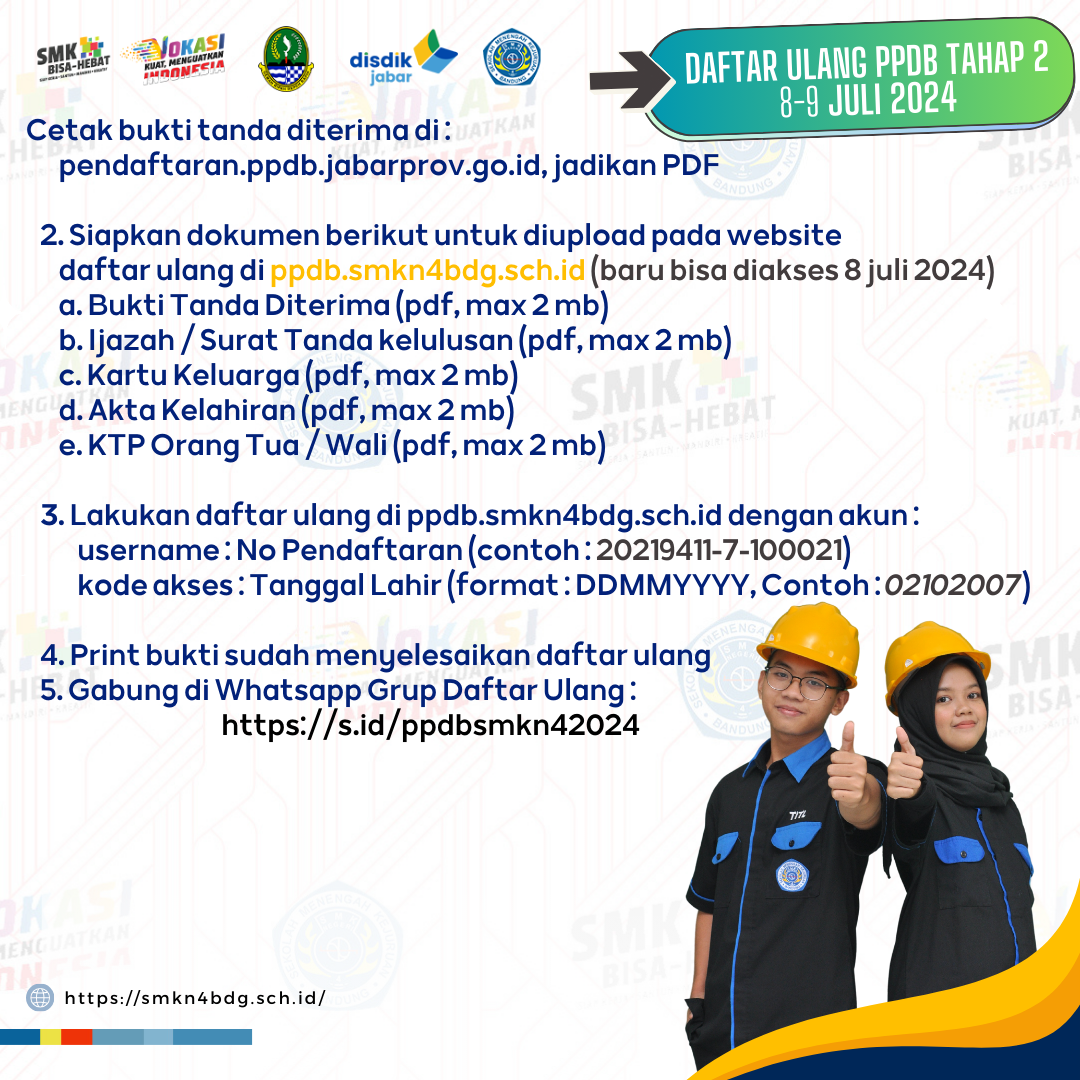
Mekanisme Daftar Ulang PPDB Tahap 1
20 June 2024
Selamat ! Kepada Calon Peserta Didik yang ...
Baca Selengkapnya